In an earlier blog we saw how the relationship between current (I), voltage(V) and resistance(R) combined into one of the most important identities in electronics called Ohm’s law. To review, the current is the speed with which the electrons are allowed to flow, the voltage is the energy exerted on the electrons to flow and resistance is any reduction in the ability of the electrons to flow.

Changing any one of the three will change the other two in a way that makes it easy to apply algebra to. If the resistance increases, the amps can’t move as fast (current decreases) and the ratio of the volts to current increases.
Similarly, in order for the current to increase, either the voltage has to be stronger than the resistance or the resistance has to decrease.
We write this relationship as
R=V/I
I=V/R
V=I x R
The first component that we looked at in an earlier blog was the resistor which obviously has to do with Ohm’s law because it’s sole job is to increase resistance.
If we put a 100 Ohm resistor across a battery’s terminals the voltage from the battery will be 1.5 volts but the current will be equal to the voltage divided by the resistance or 15 milliamps (15×10-3Amps)
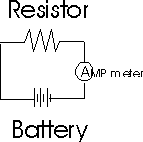

It’s worth noting that the current would be the same on either side of the resistor.
But what if we want to vary the voltage? One of the most frequently used circuits in electronics is the voltage divider which makes use of Ohms law and the fact that if you put two resistors in a series, the total resistance will be the sum of the two resistor’s ohm values or simply R1 + R2.

According to Ohm’s Law, the current I will be the Voltage divided by the resistance. Since there are two resistors this will be the sum of the two resistors you see in the denominator and the voltage in the numerator. Again, according to Ohm’s Law in order to get the voltage we multiply the current by the resistance in the second resistor which you see in the numerator of the formula in the drawing.
Suppose we had a 12 volt battery (common in robots) and two 100 ohm resistors in parallel like in the drawing above. How much voltage would we have at the output of the voltage divider?
Want to know more
http://www.youtube.com/watch?v=-mHLvtGjum4













 The outermost shell of any atom is sometimes called the valence shell. Electrons from this laye
The outermost shell of any atom is sometimes called the valence shell. Electrons from this laye
{kind=link}
Recent Comments